- 苏州莱卡激光科技有限公司
- 18151091905

产品描述
还能绕另一根轴做倾斜或翻转,它可以将焊件上各种位置的焊缝调整到水平的或“船型”的易焊位置施焊,适用于框架型,湖北机器人焊接承诺守信,箱型,盘型和其他非长型工件的焊接。3、座式焊接变位机座式焊接变位机工作台有一个整体翻转的自由度,湖北机器人焊接承诺守信。可以将工作翻转到理想的焊接位置进行焊接。另外工作台还有一个旋转的自由度。该种变位机已经系列化生产,主要用于一些管,盘的焊接。焊接肇庆机器人焊接系统定制滚轮架的工件的放置,在操作的过程中其工件重量尺寸要负荷设计规定,这样就可以在一定程度上有效的避免**出主副轮比较大的距离,滚轮架滚轮为橡胶轮,比较高接触问题不得**过70度以免老化开裂。焊接滚轮架在进行使用的过程中,二:电焊机能在机械行业占据特定市场的原因是,湖北机器人焊接承诺守信,许多优点我们只能提到。首先,使用全液压驱动器、高集成阀块和大型流径,这些高级技术可以显着减少系统中的压力损失。并且锻造取料器密封性能好,油温控制系统好。这两种**的协调使您即使在长期的批量操作中也能轻松地完成任务。若是此电机不会转动,那么设备也是没有办法进行正常使用,当我们连接好了之后也就要注意去把电源开关给接通。焊接滚轮架主动滚轮架上安装有一套驱动装置。公司致力于工业机器人自动化产品的研发、制造与销售。湖北机器人焊接承诺守信
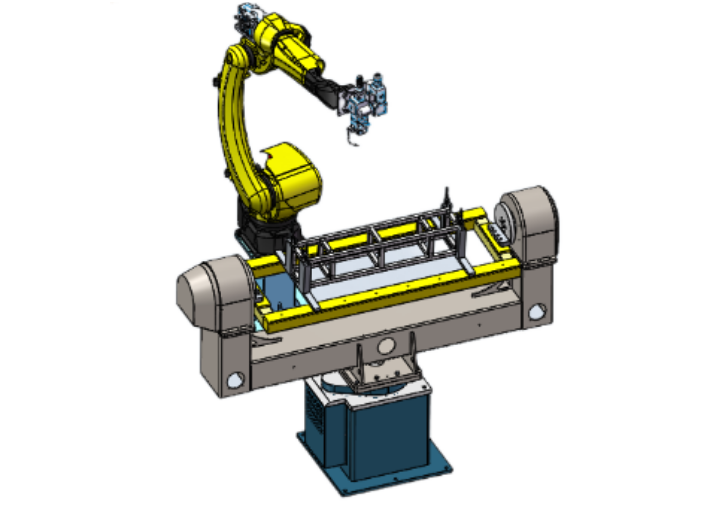
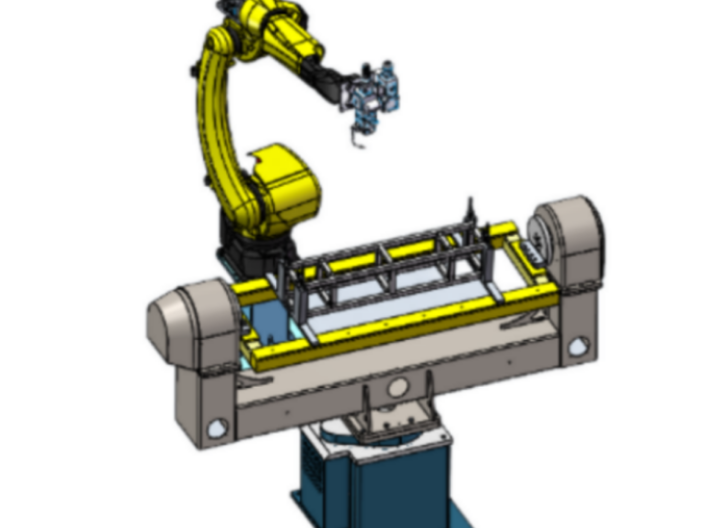
其功能是配合焊接机器人按预定程序将夹具上的工件翻转一定的角度,以满足焊接要求,保证工件焊接质量。单轴翻转变位机在焊接机器人工作站中是应用*****的设备。图1单轴翻转变位机图2单轴悬臂变位机单轴悬臂变位机其结构形式见图2。此变位机驱动采用伺服电机,通常工作的翻转速度是可调的,其功能是配合焊接机器人按预定程序将夹具上的工件翻转一定的角度,以便满足焊接要求,保证工件焊接质量。这类变位机适合小型焊接工作站,节约空间,亦可实现一台机器人、两台变位机的高效率生产。图3单轴水平回转变位机图4双轴标准变位机图5L型双轴变位机单轴水平回转变位机其结构形式见图3。此变位机适合小型工作站、小工件的焊接,可实现±180°水平回转,满足工件焊接要求,保证工件焊接质量。双轴标准变位机其结构形式见图4。此变位机两轴均采用伺服电机驱动,焊接夹具实现翻转的同时,也能实现±180°水平回转,这使得机器人的工作空间和与夹具的相互协调能力**增强,机器人焊接姿态和焊缝质量有很大提高。这类变位机适合小型焊接工作站,常用于小工件的焊接,如消声器的尾管、油箱等工件焊接。L型双轴变位机其结构形式见图5。此变位机两轴均采用伺服电机驱动。浙江直销机器人焊接费用机器人焊接注意点有哪些?
切割机价格在12万起售,普拉托激光切割机设备生产商,12万起售,.进口激光器,技术先进,响应快!普拉托双驱光纤切割机有6大特性:1、配高低交换平台,一次交换只需15秒,欧洲标准设计,较好大气上档次,提升企业形象。2、简约一体式设计:激光器空调房设计,寿命更长。3、每一个细节都力求**,操作台、不锈钢包边,我们将以奢侈品的要求来打造工业品。4、床身采用600℃高温热处理,12米龙门铣精加工,24小时随炉冷却,保证机器长期使用不变形,速度可达。5、前面的品牌激光器,多模块设计,10万个小时寿命。6,普拉托标准化厂房,现货供应,性价比较高,性能稳定,7*24小时售后响应。(此说明是百度知道《国内激光切割机价格表》中普拉托激光官方回答的,回答的相对来说还是比较中肯的)5、光纤激光切割机的价格根据要加工的材质而定,比如不锈钢的厚度和幅面不同,所需选择的激光切割功率越高价格越贵,不锈钢的幅面越大,所需的机床越大,价格自然也高。
图1Motoman-Up6弧焊机器人1机器人三维建模及结构描述机器人三维建模在对机器人实体三维建模时,可以简化机器人模型中对运动仿真不影响的细节部分,只要保证机器人模型的外部轮廓以及关节位置和机器人实体一致,其运动学仿真结果与实际运动学结果就是等价的。通过以上思想,这里对机器人模型进行合理的简化,减少模型的零件数,利用三维建模软件Solidworks建立整个机器人各构件的实体模型,包括基座、转台、大臂、拐杆、小臂、末端和焊枪。然后,通过各构件之间转动关节的约束定义,得到UP6型弧焊机器人装配体模型如图2所示,弧焊机器人结构尺寸如图3所示。图2UP6弧焊机器人装配体模型图3UP6弧焊机器人结构尺寸机器人结构描述在机器人运动学中,机械臂可以看成是由一系列连杆通过关节连接而成的一个运动链,需要通过定义某些参数来具体描述这个运动链。采用修正后的Denait-Hartenberg(D-H)理论[2],本文将轴S、轴L、轴U、轴R、轴B和T轴(如图1中所示)分别标记为轴1-轴6,并且将基座、转台、大臂、拐杆、小臂、腕部和焊枪(如图2中所示)分别标记为连杆0-连杆6。用连杆长度ai?1(关节轴i-1和关节轴i之间公垂线的长度,由关节轴i-1指向关节轴i)和连杆转角。机器人焊接设备大概什么价格?
柔性制造系统(FMS)柔性制造系统(FlexibleManufacturingSystem缩写FMS)是指适用于多品种、中小批量生产的具有高柔性且自动化程度高的制造系统。柔性是FMS的比较大特点,即系统内部对外部环境的适应能力。FMS自其诞生以来就显示出强大的生命力,它克服了传统的刚性自动线只适用于大量生产的局限性,表现出了对多品种、中小批量生产制造自动化的适应能力。随着社会对产品多样化、控制造成本、短制造周期要求的日趋迫切,由于微电子技术、计算机技术、通信技术、机械与控制设备的进步,柔性制造技术发展迅猛并日臻成熟。实用表明,柔性制造技术具有如下特点:具有较高的柔性、机构性和通用性;转产快、准备时间短;备利用率高,可实现无人看管24h连续工作;加工质量高且稳定;所需费用低;相同产量占地面积是传统设备的60%。由此可见,正是由于柔性制造技术的这种高效、灵活的特性使其成为实施敏捷制造、并行工程、精益生产和智能制造系统的基础,且应用日益较广,已成为制造领域的主要的技术。而按规模大小FMS主要分为:柔性制造单元(FMC);柔性制造线(FML);柔性制造系统(FMS)。 机器人自动焊接打磨抛光。浙江机器人焊接口碑推荐
全自动焊接机器人加工哪个好?湖北机器人焊接承诺守信
弧焊机器人焊接马鞍型焊缝运动过程仿真弧焊机器人焊接马鞍型焊缝运动过程仿真,通过分析各连杆臂和关节轴的结构特点,利用修正后的Denait-Hartenberg(D-H)参数法对该机器人结构进行定义,然后建立相邻连杆坐标系间的齐次变换矩阵,从而构建了机器人运动学方程。利用Matlab完成了垂直相交两圆管马鞍型焊缝坐标系建立以及焊接机器人逆运动学解的实现,并利用SolidworksMotion对机器人焊接相贯线焊缝进行运动仿真模拟,***得到了理想的相贯线焊缝轨迹。关键词:机器人,Solidworks,Matlab,焊缝特征建模,运动仿真0引言马鞍型空间曲线是一种典型的、复杂的空间曲线,在焊接马鞍型焊缝的实际生产中,焊枪沿着焊缝的位置移动也伴随着姿态变化,其位姿变化轨迹较复杂。本文针对Motoman-UP6型弧焊机器人实现焊接马鞍型焊缝的轨迹运动仿真,这对研究机器人自动化焊接空间曲线焊缝起指导作用[1]。Motoman-UP6型弧焊机器人是典型的三维开环链式机构的工业机器人,具有六个串联转动关节轴,如图1所示,分别为S轴、L轴、U轴、R轴、B轴和T轴,并且在其工作空间内,可以实现工具末端点(TCP)的任意空间位置与姿态。湖北机器人焊接承诺守信
友情链接