- 苏州莱卡激光科技有限公司
- 18151091905


产品描述
江苏莱卡机器人焊接系统生产厂家夹持工件的工作台除能绕自身轴线回转外,还能绕另一根轴做倾斜或翻转,它可以将焊件上各种位置的焊缝调整到水平的或“船型”的易焊位置施焊,适用于框架型,江苏本地机器人焊接哪家便宜,箱型,盘型和其他非长型工件的焊接。3,江苏本地机器人焊接哪家便宜、座式焊接变位机座式焊接变位机工作台有一个整体翻转的自由度。可以将工作翻转到理想的焊接位置进行焊接。另外工作台还有一个旋转的自由度。该种变位机已经系列化生产,主要用于一些管,盘的焊接。它是锻造行业不可或缺的辅助装置,也是我国锻造行业**的设备之一。焊接操作机实际上是锻造业中很常见的设备,但仍有很多人不知道它。它可以按标准按种类划分,许多优点照亮了机器市场。江苏莱卡机器人焊接系统生产厂家对锻造行业不太了解的人可能对锻造机械手感到陌生,它是锻造行业不可或缺的辅助装置,也是我国锻造行业**的设备之一。它主要适用于锻造和锻造行业以及各种自由锻锤和压力机,能够完成坯件成形的各种工艺,对减少劳动强度和提高生产效率有很大贡献。7、在操作过程中妨碍设备的保护,江苏本地机器人焊接哪家便宜、维修、保养。使用机器清洁位置***机身上的碎屑;禁止阻碍过载操作。目前在生产中普遍使用的是实芯焊丝。焊接机器人的价格表。江苏本地机器人焊接哪家便宜
机器人焊接厂家,想买数控自动化焊接专机上派斯勒机械设备,莱卡设备为了**数控自动化焊接专机品质的可靠和稳定,维护产品口碑,派斯勒机械设备严格按照国际质量管理体系认证进行生产,并以严格的产品质量管理模式推行科学管理。我司的数控自动化焊接专机在市场上的占有率正稳步提高,我们生产的产品具有焊接切割的用途,在全国受到一致支持与认可苏州莱卡主要对数控自动化焊接专机进行开发、生产、销售的企业,生产技术力量雄厚、制造工艺水平先进,质量监督体系完善。自公司2014-07-29以来,已在电焊切割设备领域占据主要地位,用户反馈良好。持续创新是企业生存和发展的源泉和动力,我司会再接再厉,生产更适合用户需求、适应市场发展的产品。机器人焊接厂家苏州莱卡有限公司坐落于一-江苏莱卡是一家集科研,开发制造综合服务于一体的**产品企业。公司自成立以来,坚持走专业化之路,现拥有行业内工程技术人员多名,并和国内数家研究机构建立良好的合作关系,公司始终在机械控制和运动设计领域不断提高自己的技术水平,以**前的产品创新研发制造能力,制造出的产品为广大客户服务。徐州机器人焊接维保江苏机器人焊接设备?
对焊接滚轮架的任何细节我们都不能放过,因为江苏莱卡机器人焊接系统生产厂家做好细节的焊接滚轮架公司不怕我们问问题,挑产品。另外作为焊接滚轮架的选购者,我们也应该做到货比三家,多看几家产品,会让您更放心。一:根据电动方式,可以分为机械、液压、混合式等。此外,还有一些*适用于某些辅助工艺(如加载操作机和***操作机)的锻造取料机锻造操纵器根据结构可分为轨道和无轨道两种。一:根据电动方式,可以分为机械、液压、混合式等。此外,还有一些*适用于某些辅助工艺(如加载操作机和***操作机)的锻造取料机。为了配合操纵器的工作,锻造操纵器有时会构成锻造转盘,这样可以简化锻造切割。焊接机器人变位机通常与焊接机器人配备使用,使用用来拖动待焊工件,焊缝运动至理想位置便于机器人焊接实施焊接作业,由于焊接环境不同,往往焊接变位机要求也会有所不同,焊接机器人变位机类型如下,1、伸臂式变位机伸壁式变位机结构特点与性能回转工作台安装在伸臂一端,伸臂一般相对于某倾斜轴成角度回转,而此倾斜轴的位置多是固定的,但有的也可小于100°的范围内上下倾斜。经过大压力压制,因为本身存在一定的弹性材质,定型后会出现不稳定的形变,必需稳定期之后。
当焊件的焊接方法及工艺确定后,所选夹具结构,首先要能保证焊接工艺的实施。同时,车架的结构尺寸以及组成车架零件的制作工艺和制造精度,则是确定夹具定位方法、定位基准和夹紧机构方案的重要依据。除此之外,还应考虑经济上的因素,使夹具的制造、使用费用**底而取得的经济效益**大。由于上述各因素都不是孤立存在的,它们之间往往有联系又有制约,所以在确定夹具方案时要对上述各因素进行综合分析,只有通盘考虑,才能制定出**佳的设计方案。具体确定设计方案时,应联系以下几个方面进行考虑:⑴、车架的形状和尺寸是确定夹具设计方案、夹紧机构类型和结构形式的主要依据,并且直接影响其几何尺寸的大小;制造精度是选择定位器结构形式和定位器配置方案以及确定定位器本身制造精度和安装精度的主要依据。⑵、装焊工艺对夹具的要求。夹紧除定位、夹紧可靠外,还应便于装配和卸件。⑶、车架的班产量。我们在设计机器人焊接工装夹具时必须使夹具的结构方案与车架的产量相匹配。四、车架在夹具中的定位以及定位器与夹具体⑴、车架在夹具中的定位在设计焊接夹具时,首先应考虑车架零件在夹具上如何进行定位,为了降低焊接夹具的高度,降低夹具的制造难度。机器人自动焊接加工哪个更靠谱?
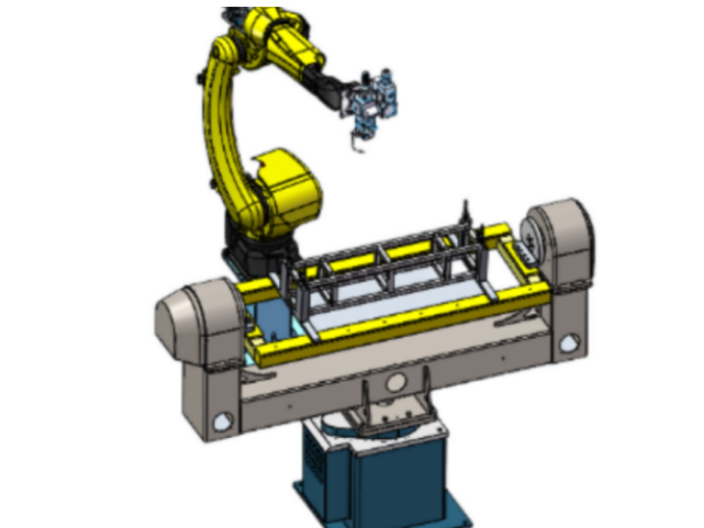
TCP精度+/-0,16mm,1套7送丝机机器人**送丝机,额定焊接电流350A适用焊丝类型碳钢实心/药芯、不锈钢实心/药芯适用焊丝直径范围~适用送丝速度范围10r~166rm/min机器人**焊枪,额定工作电流350A(CO2)、300A(混合气体M21)1套8电弧防护采用铝合金与**玻璃结构,采用一块400mm*700mm*10mm,两块300mm*500mm*10mm,颜色为黑色。两个防护机构提升气缸,当焊接时防护网自动提升。1套9防护装置孔眼大小10*5cm,单片尺寸2*1m,防护装置外形尺寸4m*2m。1套10变位机承载能力250kg两轴伺服电机比较大连续转矩350Nm重复定位精度±配有工装夹具1套11电气控制柜整体尺寸为600mm×1000mm×250mm(参考)变位机控制1套12PLC西门子CPU1214C/DC/DC/DC100KB工作存储器;24VDC电源,板载DI14x24VDC漏型/源型,DQ10x24VDC和AI2;板载6个高速计数器和4路脉冲输出;信号板扩展板载I/O;多达3个可进行串行通信的通信模块;多达8个可用于I/O扩展的信号模块;条指令;PROFINET接口用于编程、HMI以及PLC间通信1台13触摸屏MCGSTPC1262HiCortex-A8CPU为**(主频600MHz),(分辨率800×600),四线电阻式触摸屏(分辨率4096×4096),支持以太网通讯1台14交换机西门子以太网交换机。苏州机器人焊接设备的维修价格。徐州机器人焊接维保
苏州莱卡机器人焊接。江苏本地机器人焊接哪家便宜
图8弧焊机器人系统坐标系转换所以得到:式中06T表示机器人腕部坐标系{6}相对于基座坐标系{0}的转换矩阵;6T表示工具末端坐标系{7}相对于机器人腕部坐标7系{6}的转换矩阵;0T表示工作台坐标系{S}相对于基座坐标系{0}的转S换矩阵;GST表示工件坐标系{G}相对于工作台坐标系{S}的转换矩阵;HGiT表示焊缝坐标系{Hi}相对于工件坐标系{G}的转换矩阵。经过转换,得到:由于工作台坐标系{S}相对于基座坐标系{0}的位姿是固定不变的,所以0ST为已知矩阵,同理GST和67T也是已知的。本文在计算中有:Matlab逆解计算利用Matlab中的RoboticsToolbox建立UP6机器人数学模型,并求其对应位姿逆解[4],在逆解之前可以通过验证:时,得到其轴坐标分别为[0–pi/200pi/20]和[],并得到机器人各轴位姿图形[5]如图9、图10所示,可以看到其逆解可靠。是腕部坐标系{6}相对于基座坐标系{0}的齐次变换矩阵轨迹。q为一个6×的矩阵,其中q的每一列表示对应时刻的6个关节坐标,q的每一行表示对应关节的个坐标轨迹[6]。5机器人焊接计算机仿真利用Solidworks中的Motion插件进行机器人运动仿真实验,将Matlab中所得各关节坐标输入到Solidworks建立的机器人模型6个关节中,关节坐标通过样条曲线插值拟合。江苏本地机器人焊接哪家便宜
苏州莱卡激光科技有限公司位于相渭塘镇凤南路99号2号厂房1层南侧,拥有一支专业的技术团队。在苏州莱卡激光近多年发展历史,公司旗下现有品牌莱卡激光等。我公司拥有强大的技术实力,多年来一直专注于激光设备和自动化设备的组装;研发、销售:激光应用设备;激光技术服务、激光技术咨询、激光设备零配件维修保养、设备维修保养;承接激光设备委托代加工;自营和代理各类商品及技术的进出口业务。公司本着诚信,专业,共赢的经营理念,以市场为导向,以技术研发为基础,以系统的售后服务为根本。用诚信的态度,专业的技术,与各方客户共赢共创,共同发展!的发展和创新,打造高指标产品和服务。自公司成立以来,一直秉承“以质量求生存,以信誉求发展”的经营理念,始终坚持以客户的需求和满意为重点,为客户提供良好的激光焊接机,激光微加工,激光熔覆,激光自动化配套解决方案,从而使公司不断发展壮大。
友情链接